Como ya es bien sabido por toda la comunidad que trabaja con proyectos sencillos basados en microcontrolador, Arduino es una plataforma que permite acercarse de manera muy sencilla al mundo de los microcontroladores sin saber prácticamente nada de electrónica. El precio del Arduino más sencillo es de 20 Euros para el Arduino UNO. Bastante barato. Uno se puede comprar el procesador Atmega con el bootloader de Arduino por unos 6 Euros y montarse la placa si va justo de dinero. Parece que es el precio mínimo de desarrollo para no iniciados en microcontroladores, ¿no?
¡Pues NO! La gente del proyecto Energía ha reventado el precio de los proyectos sencillos desarrollando un entorno tipo Arduino para el Launchpad de Texas Instruments. El software y las instrucciones de uso del proyecto Energía las teneis aquí:
Las instrucciones son muy fáciles de seguir y, una vez arrancado el programa, lo único que se ha de configurar es el puerto en el que se halla conectado el Launchpad y el modelo de microcontrolador que lleva.
Como ejemplo os muestro un programa que he desarrollado en unos minutos a partir del típico ejemplo Blink que hace parpadear un led. Mi modificación hace parpadear dos leds en lugar de uno. No es gran cosa pero demuestra lo fácil que es hacer un programa. Nada que extrañe a alguien que haya usado Arduino.
Sketch Blink2 que hace parpadear dos leds
Escribiendo el Sketch y pulsando el segundo botón desde la izquierda (Upload) el programa se compila y se carga en el launchpad si está conectado al cable USB. En un momento tenemos dos leds parpadeando a distinto ritmo.
Para poder desarrollar programas es necesario conocer la correspondencia entre los pines del microcontrolador identificados como P1.0 a P1.7 y P2.0 a P2.5 (en microcontroladores de 20 pines) y los números de pin que usa el entorno que van del 2 al 15. En realidad el Launchpad puede usar los pines P2.6 y P2.7 si no usa cristal de cuarzo, pero, por lo que veo, esta opción no está actualmente implementada en Energía. En todo caso, la correspondencia de pines está en el fichero pins_energia.h que se halla en el subdirectorio:
hardware\msp430\variants\launchpad
dentro del directorio de instalación de Energía. En todo caso, para simplificar, la correspondencia es esta:
En diseño de circuitos uno espera que los componentes se comporten siempre de la misma manera, que cuando compras un recambio de un componente por otro que tiene exactamente el mismo nombre, el funcionamiento sea el mismo. Lamentablemente eso no siempre es así, y en ocasiones, el fabricante no se toma muchas molestias en avisarlo.
Explicaré un caso concreto con la placa STM32F4 Discovery. La mejor y más potente placa de la familia Discovery.
Placa STM32F4 Discovery
El problema
Hace ya un tiempo compré una placa de éstas y empecé a trabajar en el software. El entorno de trabajo, algún dia hablaré del él, está basado en Eclipse y usa compiladores GCC. Hasta el momento he probado con Code Sourcery y Yagarto. Para depurar empleo el servidor GDB que veía con la versión gratuita de Atollic True Studio for STM32.
Como todo iba bién con la placa compré una placa nueva, igualita a a la otra que ya tenía. Mi sorpresa fué que el debugger se colgaba al intentar comunicarse con el microcontrolador.
Para descartar que fuera una placa defectuosa intenté programar en la placa usando el software STLink Utility que proporciona gratuitamente ST para programar sus microcontroladores.
Nada más arrancar ya se veía que algo iba mal.
Aplicación STLink Utility
El software era capaz de comunicar con el microcontrolador, pero no era capaz de averiguar de que micro se trata tal como se desprende de la frase "Unknown Device" arriba a la derecha de la pantalla. Fijémonos, luego diré porqué, en la identificación de la CPU que es 0x413
Al intentar programar el dispositivo las cosas se complican.
Es extraño, nunca habia visto este mensaje, le digo que adelante.
El programa es incapaz de programar el micro. Por lo visto está activada la protección que deshabitlita el bus JTAG para que no pueda extraerse el código del micro. Es extraño porque la placa es nueva.
La protección se configura con los llamados option bytes. Voy a la ventana pertinente y sale algo como ésto:
Parece que la protección de lectura está activada y la flash está protegida contra escritura. No se puede programar el micro y no se puede quitar la protección. No se puede usar el micro para nada que no sea usar el software de demostración que ya venía en la placa.
¡¡ Y la placa era nueva !!
La solución
Después de mucho buscar por internet a alguien que le hubiera pasado algo similar encontré esta referencia.
Por lo visto la gente tenía problemas con la versión "Z" de la CPU. Las placas STM32F4 Discovery, por lo visto, llevaban antes CPUs de versión "A". El último batch de placas usa CPUs de versión "Z".
La siguiente figura muestra una CPU de versión A.
STM32F407 Version A
A continuación se muestra una CPU de versión Z.
STM32F407 VersionZ
Parece ser que en el paso de la versión A a la versión Z, la identificación de la CPU ha pasado de 0x411 a 0x413. A continuación se muestra el programa STLink Utility conectado a una CPU de versión "A" donde se vé como se identifica como 0x411 a diferencia de la identificación 0x413 de la versión "Z".
STLink Utility con STM32F4 versión "A"
Misterio solucionado. Pero en esta historia hay algunos puntos muy molestos:
Que ST envie placas STM32F4 Discovery incompatibles con versiones anteriores del software sin avisar de los posibles problemas de compatibilidad.
Que ST no actualice la aplicación STLink cuando cambia los MCUs que soporta.
Que la aplicación STLink no sea capaz de decir que no sabe como trabajar con el micro en lugar de hacernos creer que se ha habilitado la protección contra escritura.
Suerte que en la misma referencia que cité anteriormente se proporcionaba el link a una versión parcheada de STLink Utility para poder programar la placa.
Como información adicional de los cambios de la versión "A" a la versión "Z", parece que no hay más versiones intermedias. Éstos están documentados en el la Errata Sheet del microcontrolador. Lo que no se dice en este documento es la incompatibilidad que produce con las propias aplicaciones de ST.
Finalmente me alegra decir que la versión actual del servidor GDB de ATollic True Studio es capaz también de comunicarse con la CPU "Z" maldita.
En este artículo explicaré por encima el funcionamiento del oscilador controlado digitalmente DCO de la familia MSP430 y explicaré un procedimiento, software incluido, para calibrar este oscilador para un conjunto de frecuencias elegido.
Para empezar, hablaremos del DCO...
Descripción del DCO
Los microcontroladores MSP430 de Texas Instruments, por ejemplo los compatibles con la placa Launchpad, disponen de un oscilador RC interno controlado digitalmente (DCO). El DCO se controla con 3 valores digitales:
RSELx (0..15) Selecciona un rango de frecuencia de funcionamiento
DCOx (0..7) Selección fina de frecuencia dentro del rango elegido
MODx (0..31) Modulación de frecuencia entre DCO elegido y el siguiente DCO+1
Los valores RSELx y DCOx, por tanto seleccionan la frecuencia del oscilador interno tal y como se muestra en la siguiente figura de la familia MSP430x2xx (slau144i).
Frecuencia vs RSEL,DCO
Se ha de tener en cuenta que los rangos que cubren los distintos valores de RSEL se pueden solapar entre si, por tanto, es posible que RSEL=7 DCO=7 de una frecuencia mayor que RSEL=8 DCO=0.
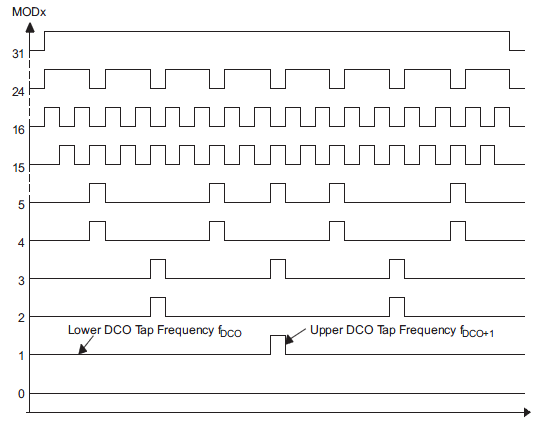
El valor de MODx permite un ajuste más fino de la frecuencia media del oscilador. Básicamente, cada 32 ciclos, (32-MOD) ciclos se harán con la frecuencia DCO y MOD ciclos se harán con la frecuencia DCO+1. Para que esto funcione el valor de DCO elegido ha de ser inferior a 7 ya que no existe DCO+1 cuando DCO=7. Ls siguiente figura muestra el patrón de modulación para distintos valores de MOD.
Modulación del oscilador DCO
Es importante notar que el uso de la modulación introduce Jitter en la señal de reloj. Eso puede ser o no importante para una aplicación concreta pero es importante tenerlo en cuenta si necesitamos instantes de captura completamente periódicos.
Calibración del DCO en producción
El problema general es que las relaciones entre RSEL y DCO y la frecuencia generada tienen una tolerancia muy elevada por lo que para tener frecuencias de operación mínimamente exactas es necesario calibrar el oscilador. A modo de ejemplo, para la familia MSP430G2x21 (slas694i) con RSELx = 7, DCOx = 3 y MODx = 0 que es el valor con el que arranca el microcontrolador, pueden dar valores de frecuencia entre 0,8 y 1,5 MHz. Esto es, el error puede ser de 0,35MHz (un 23%) respecto de un valor central de 1,15MHz.
Calibrar el oscilador es determinar que valores de RSEL, DCO y MOD se han de programar para generar una determinada frecuencia. Aún usando valores calibrados el oscilador tiene una cierta tolerancia que puede ser de hasta +/- 6% para todo el rango de temperaturas y tensiones de alimentación, pero, aun así, es mucha menos tolerancia que un DCO no calibrado. Sin embargo, si calibramos el oscilador cuando el circuito opera a la tensión y temperatura de operación, la deriva será mucho menor.
Todos los microcontroladores de la familia MSP430 se calibran en el momento de producirlos, al menos a la frecuencia de 1MHz. Los valores de RSEL, DCO, y MOD que han de programarse en los registros DCOCTL (DCO y MOD) y BCSCTL1 (RSEL) se guardan en la memoria flash del microcontrolador.
Usar los valores calibrados en factoría está bien, pero tiene algunos inconvenientes:
Sólo podemos usar las frecuencias elegidas por Texas Instruments para nuestro microcontrolador. El MSPG2211 sólo tiene la de 1MHz, el MSPG2553 tiene lass de 1, 8, 12 y 16MHz. Si nos interesa una calibración a 4MHz, mala suerte.
Texas Instruments realiza sus calibraciones a 30ºC y 3V. Si nuestro sistema ha de operar lejos de estos valores la calibración no será buena.
Para solventar estos problemas podemos hacer la calibración nosotros mismos.
Calibración de usuario del DCO
Para realizar la calibración debemos de contrastar la frecuencia que genera el DCO con una referencia más exacta. Podemos entonces variar los valores de RSEL, DCO y MOD para lograr la frecuencia deseada.
Un buen patrón para realizar la calibración es el oscilador de cristal externo de 32768 Hz. Hay varios motivos para ello:
Un cristal de este tipo puede tener una precisión de 10 a 20ppm
Todos los microcontroladores de la serie MSP430 pueden usar un oscilador externo de 32768Hz
El Launchpad viene con un un cristal de este tipo, aunque sin soldar. En otro artículo hablo de como instalar un cristal de 32768Hz de manera temporal o permanente en el launchpad.
Buscando en internet se ve que hay varias personas que ya han llegado a esta conclusión como se demuestra aqui y aqui. Incluso existe una libreria de Texas Instruments al respecto.
En general, la mayor parte de soluciones reescriben la Sección A de Information Area de la flash del micrcontrolador que es donde Texas Instruments guarda la información de calibración del oscilador y otros elementos durante la producción. Es por eso que este área está especialmente protegida por un flag de seguridad (LOCKA).
Reescribir este área es potencialmente peligroso porque podemos perder información de calibración importante de otros elementos como el ADC y porque este área está protegida por un checksum que algunas aplicación podrían revisar. Es cierto que se puede recalcular el checksum, pero, igualmente corremos riesgos de borrar información importante.
Los microcontroladores MSP430 tienen 3 áreas más de información (B,C,D) en la flash, todas ellas de 64 bytes igual que el área A, pero, a diferencia del área A, están vacían en los microcontoladores que salen de la factoría de Texas Instruments. En mi caso he pensado que sería mejor guardar la nueva información de calibración en la Sección B y no tocar la sección A para nada.
Dentro de esta área guardaré 9 valores de calibración para las frecuencias de 500Hz, 1MHz, 2MHz, 4MHz, 6MHz, 8MHz, 10MHz, 12MHz y 16MHz. La posición donde guardaré los valores de calibración las he incluido en un fichero NewDCOCal.h para tener una mejor referencia de sus posiciones. Si hace falta, se pueden cambiar o añadir nuevos valores de calibración si hace falta.
Programa de Calibración
Para realizar la calibración he realizado un programa DCO Calibration. Este program depende, a parte de NewDCOCal.h, del fichero io430masks.h. El programa se ha compilado con el compilador MSPGCC bajo Eclipse y, optimizado en tamaño, cabe en cualquier microcontrolador con al menos 2kB de flash.
El programa está pensado para hacerse correr en la placa Launchpad, por ello se emplean los siguientes pines:
Xin/Xout : Cristal de 32768Hz
P1.0 : Led Verde
P1.3 : Pulsador a tierra
P1.6 : Led Rojo
Adicionalmente se emplean dos pines para verificar los osciladores:
P1.4 : Salida de cuadrada a la frecuencia del DCO
P1.5 : Salida de 256Hz generada por el oscilador de 32768Hz
Cuando el programa arranca, verifica si hay información en la sección de información B. Si hay información, pasa al modo de generación de frecuencia descrito más delante. Si no hay datos, se realiza la calibración, se guarda en la sección de información B de la flash y se pasa al modo de generación de frecuencia.
Durante la calibración el pin P1.4 muestra la frecuencia actualmente generada. Cada vez que se pasa a calibrar una nueva frecuencia, el led verde parpadea una vez. Si la calibración de una frecuencia se ha de repetir por no cumplir con la tolerancia deseada, parpadean los dos leds rojo y verde.
En modo de generación de frecuencia el sistema programa la primera frecuencia de la lista de frecuencias calibradas (500kHz). Cada vez que se pulsa el pulsador que se halla en P1.3 se salta a la siguiente frecuencia de la lista para pasarse otra vez a la primera (500kHz) después de la última (16MHz). En este modo P1.4 tiene la frecuencia generada y el led verde parpadea a la frecuencia generada dividida por 20*65536 (20 desbordamientos del Timer A0).
En caso de error, el programa se bloquea mostrando un código de error mediante un número de parpadeos:
(1) Fallo del oscilador de 32768 Hz
(2) Problemas al calibrar una frecuencia
(4) No existe calibración de fábrica para 1MHz (necesaria para programar la flash)
(5) No puede lograrse la cota de error deseada (por defecto menos del 5%)
(Led Continuo) Problemas al arrancar el oscilador de 32768 Hz
Funcionamiento del programa
Para calibrar el oscilador el Watchdog se programa en modo temporizador con un período de unos 1,9ms (64/32768Hz) usando el oscilador de cuarzo. El timer A0 se configura en modo contínuo con el DCO como entrada. Se genera una captura del timer A0 cada vez que se da la interrupción del Watchdog. Calculando el número de ciclos del DCO entre dos capturas podemos inferir la frecuencia del DCO.
Frecuencia DCO = 512 * Ciclos entre capturas
Para aumentar la precisión, se promedia el intervalo de 50 capturas.
El programa comienza eligiendo el valor de RSEL, a continuación se elige el valor de DCO que se halla justo por debajo de la frecuencia deseada. Finalmente se ajusta la modulación MOD entre esta frecuencia de DCO y la siguiente.
Compilación condicional
El programa contiene 3 defines que permiten compilación condicional.
Si se activa el define DEBUG, el programa guarda los valores de RSEL, DCO y MOD junto con el error de calibración en cada frecuencia. De esta manera se puede verificar con el debugger.
Si se activa el define FLASH_OVERRIDE el programa reescribirá la información de la Sección B aunque no se halle vacía.
Si se activa el define TEST_MODE, toda la calibración se realizará en RAM para verificar el funcionamientod e la calibración sin tocar la memoria flash.
Video del funcionamiento
A continuación se muestra un video del funcionamiento del sistema de calibración en un Launchpad version 1.5 con el procesador MSP430G2553 que lleva por defecto. Junto al Launchpad tenemos un osciloscopio que muestra la frecuencia generada y un multimetro que trabaja como frecuencímetro.
En este artículo hablaré de la instalación del cristal de cuarzo de 32768Hz en el Launchpad. Un cristal de 32768Hz es fundamental para disponer de un reloj de tiempo real. En efecto 2^15 ciclos de este oscilador corresponden a un segundo. En el caso de la familia MSP430, en concreto, podemos usar el Watchdog en modo timer para generar una interrupción exactamente cada segundo usando como base este cristal de cuarzo.
Launchpad y bolsa con el cristal
Este cristal de cuarzo viene incluido en la caja del Launchpad, pero no se halla soldado en la placa. El motivo por el que no viene soldado es porque el cuarzo ocupa 2 pines del microcontrolador que podrían ser usado como líneas de I/O. Dependiendo de la aplicación, por tanto, nos puede interesar no soldar este cristal para poder disponer de estas líneas.
En la siguiente figura se muestra la localización del cristal de cuarzo.
Localización del cristal
El problema a la hora de poner el cristal es que el que se proporciona con el Launchpad es muy pequeño y cuesta de soldar. Para hacer las cosas más fáciles lo mejor es sujetar el cristal en su sitio con cinta adhesiva. Se ha de andar con ojo porque el cristal tiene delante y detrás. En la posición correcta los dos pines deben quedan apoyados sobre los pads de soldadura.
Cristal sujeto con cinta adhesiva
Para soldar el cristal conviene tener una lupa y un soldador de punta fina, pero con paciencia al final queda bien soldado. Si se cortocircuitan los pads, se retira el estaño con cinta de desoldar y vuelta a empezar.
Cristal soldado
Una vez soldados los dos terminales del cristal, podemos retirar la cinta adhesiva con cuidado de no arrancar el cristal y, a continuación, soldamos el cuerpo del cristal en el pad que tiene debajo.
Soldadura del cuerpo del cristal
Una vez soldado el cristal, se debe probar que funciona correctamente. Para ello he realizado un programa de test bajo Eclipse basado en dos ficheros main.c y io430masks.h.
El programa intenta poner en marcha el reloj basado en el cristal externo de 32768Hz. Si funciona correctamente, el led verde parpadea cambiando cada segundo. Si el oscilador falla, se enciende el led rojo.
Solución a problemas
Si el oscilador no funciona, lo primero es revisar las soldaduras.
El oscilador es muy sensible a cualquier interferencia. Los pines del oscilador, dado que pueden ser usados como I/O, están conectados a los pines de salida de la placa Launchpad. Para minimizar las interferencias se puede desconectar el oscilador de estos pines retirando las dos resistencais de cero ohmios que unen el oscilador con los pines. En la siguiente figura se muestra la localización de estas resistencias. Esta figura se puede comparar con la anterior que aún tenía las resistencias soldadas.
Resistencias eliminadas
Alternativa al la soldadura
Finalmente, para la gente a la que esta soldadura le resulte muy complicada o, para quienes no quieran sacrificar de manera permanente los dos pines de I/O, existe la posibilidad de poner el cristal de cuarzo conectado a los pines externos de la placa.
El procedimiento se puede hacer con el cristal que viene con el launchpad, pero, debido a su tamaño,no es la solución más cómoda. Los osciladores de 32768Hz son fáciles de conseguir y baratos. Es importante, no obstante, comprarlos con una capacidad soportada por la familia MSP430 como 12,5pF o 6pF para no tener que añadir capacidades externas. A modo de ejemplo está este de Farnell que es el que he empleado.
En la siguiente figura se muestra un cristal de 32768Hz soldado a dos pines hembra.
Cristal soldado a pines hembra
Para emplear el cristal basta con conectarlo en la placa en los pines correspondientes.
Cristal sobre los pines de la placa
Con ello acaba este artículo sobre el cristal externo del Launchpad. Con un cristal como éste es fácil desarrollar aplicaciones que requieran una temporización precisa como sistemas basados en reloj de tiempo real, frecuencímetros, etc...
Una de las grandes ventajas de los microcontroladores MSP430 de la serie value line G2xxx es que, a parte de ser baratos, están disponibles en encapsulado DIP de 14 o 20 pines. Eso los hace muy interesantes para cualquier proyecto sencillo desarrollado en una placa de topos e, incluso, en una protoboard.
Usando el Launchpad podemos programar cualquier microcontrolador de la serie value line para luego insertarlo en nuestro circuito. Sin embargo, a parte del engorro de quitar y poner chips, dado que los zócalos no son ZIF, nos arriesgamos a dañar los chips cada vez que los sacamos e insertamos del zócalo.
Dado el bajo precio de la placa Launchpad, siempre podemos insertar toda la placa en nuestro sistema y así, poder programarla mediante USB, no obstante, esta no es la solución más compacta.
En este artículo explicaré el procedimiento para programar In System (ISP) sistemas desarrolados con microcontroladores MSP430 value line.
Para que el microcontrolador sea programable In System es necesario que se cumplan las siguientes condiciones:
Tener disponibles los pines TEST y RESET del microcontrolador. Estas dos señales, durante la programación ISP llevan el reloj y los datos, respectivamente, del canal de comunicación usado en la programación.
Que la señal RESET no se halle directamente conectada a alimentación. Dejar RESET conectado a la alimentación no perjudica el funcionamiento normal del microcontrolador, pero evita que pueda ser programada In System.
La siguiente figura muestra un esquema de un sistema sencillo basado en el microcontrolador MSP430G2452 que se halla incluido como segundo chip en la versión 1.5 del Launchpad.
Esquema de sistema sencillo basado en MSP430G2452
El sistema tiene lo necesario para ser programado In System y un led conectado a P1.0 para poder verficar que el programa cargado corre correctamente. La línea TEST se lleva directamente al conector de programación. La línea RST (Reset), a parte de ir al conector, incluye una conexión a Vdd con una resistencia de 47k y un condensador de 1nF a masa. Si deseamos añadir al sistema un pulsador de Reset, éste se puede añadir entre RST y masa en paralelo con el condensador.
Importante: El condensador que se halla en la línea RST puede ser algo mayor de 1nF pero no mucho mayor. Si el valor es excesivo, el programador no será capaz de establecer la comunicación.
La siguiente imagen muestra el esquema anterior implementado en una placa protoboard.
Implementación en Protoboard
Para realizar conexión de programación se ha elegido una tira de 5 pines, macho en la placa y hembra en el cable de programación. Para evitar que se pueda conectar al revés, uno de los pines está cortado en el lado de la placa y cegado en el cable.
Disponer de Vdd en el conector de programación no es estríctamente necesario, pero permite alimentar la placa desde el Launchpad y evitar gastar pilas cuando se depura. Si se desea tener siempre alimentaciones independientes, se puede eliminar Vdd del conector de la placa. En todo caso, el sistema sólo puede tener una fuente de alimentación al mismo tiempo, bien sea propia o bien sea a través de conector de programación. Por tanto, mientras se depura con Vdd conectado, se han de quitar las pilas o cualquier otra fuente alternativa de la placa.
Para conectar la placa al Launchpad he montado un cable de algo menos de 20 cm que lleva las 4 señales de interés Vdd, TEST, RST y GND. El cable tiene un conector hembra de 5 pines en el lado de la placa y 4 conectores hembra independientes en el lado del Launchpad. A la hora de diseñar el cable conviene que, al menos, TEST y RST sean de la misma longitud. Del mismo modo conviene mantener la longitud de los cables lo más corta posible.
Cable de conexión con sus colores
Cable construido
Para realizar las conexiones en el launchpad, deben quitarse los 5 jumpers que unen la zona de emulación con el resto de la placa.
Jumpers a quitar
Una vez quitados los Jumpers, se conectan las líneas Vdd, TEST y RST al lado del emulador de los Jumpers correspondientes y la línea GND al pin de arriba de la tira derecha de la placa. Se ha de vigilar porque el orden de los Jumpers no es mismo en todas las placas Launchpad. En todo caso no hay pérdida porque todas las señales se hallan correctamente serigrafiadas.
No hace falta retirar el microcontrolador del zócalo que hay en el Launchpad ya que, al quitar todos los Jumpers, el chip queda completamente aislado del emulador.
Conexión Protoboard - Launchpad para ISP
Conectamos el cable de programación que une el Launchpad a la placa que deseamos programar en modo ISP y ya sólo queda desacargar el programa para probarlo.
El código del programa que hace parpadear el LED en P1.0 se halla en este enlace. Basta crear un nuevo proyecto con la herramienta elegida para programar el chip y descargarlo en la placa igual que se haría con el chip contenido en el Launchpad.
En mi caso empleo mspgcc bajo eclipse tal y como describo en un artículo anterior.
Una vez descargado y depurado el programa, se puede usar la placa de manera autónoma con su propia alimentación después de desconectar el cable de programación.
Protoboard corriendo autónomamente
Con esto acaba este articulo. Sólo se trata de un pequeño sistema que hace parpadear un LED, pero es ampliable a cualquier sistema que deseemos programar en modo ISP.
AMPLIACIÓN PARA EL USO DEL CANAL SERIE
Es posible ampliar el sistema incorporando el canal serie a través de USB que proporciona el emulador. Para ello se han de añador dos lineas adicionales conectadas a los Jumpers correspondientes TXD y RXD. No obstante se ha de hacer con cuidado para placas Launchpad de versión 1.5 o posteriores. A parte del hecho de que el orden de señales se ha cambiado en los Jumpers, las conexiones del emulador no se hallan todas en el mismo lado.
La siguiente figura muestra un detalle del esquema de la Placa Launchpad v1.5 del documento slau318b.
Esquema de Jumpers en Launchpad v1.5
Cuidado que BTXD es la transmisión del emulador, que conecta con recepción del microcontrolador (RXD). Por su parte BRXD es la recepción del emulador, que conecta con la emisión del microcontrolador (TXD). Los valores rotulados en la placa RXD y TXD corresponden a Recepción y Transmisión respectivamente desde el punto de vista del microcontrolador.
En concreto, Vcc, TEST y RST se hallan todas en el lado del emulador, iguar que la línea RXD (BTXD del emulador). La línea TXD (BRXD del emuilador) del último Jumper, sin embargo, se halla en el lado de la placa correspondiente al microcontrolador, no en el lado del emulador. Este cambio se hizo para que, cambiando la orientación de los Jumpers asociados a BRXD y BTXD se puedan cambiar las conexiones establecidas:
Jumpers Verticales (Igual que los otros) TXD en P1.1 y RXD en P1.2
Jumpers Horizontales (Perpendiculares a los otros) TXD en P1.2 y RXD en P1.1
Esto era necesario para poder usar la conexión serie por Hardware que facilita la UART de los microcontroladores más avanzados de la seríe MSP430G2xxx
Con este artículo acaba la serie del proyecto Aquarium.
Una vez comprobado que el prototipo funciona correctamente, es el momento de pasar a la versión final del sistema. El primer paso es realizar una placa que integre la mayor parte del hardware que no es la placa STM8L Discovery.
La placa contiene el driver L923D y el regulador de 5V 7805. Esta placa se acompaña de una placa más pequeña que incorpora los 3 pulsadores que permiten configurar el sistema.
Placa principal y Pulsadores
En la figura de arriba se aprecia la placa principal junto con la de pulsadores. En la placa también se obervan los conectores hembra que se unirán a las conexiones de alimentación, masa y GPIO de la placa STM8L Discovery.
A la derecha de la placa principal tenemos 4 puertos de conexiones con conexiones macho en ángulo recto. De arriba a abajo son:
Conector para el motor del alimentador de comida
Conector de salida para los relés
Conector con +5V regulados
Conector de entrada de alimentación no regulada de 9V a 12V
La salida de +5V regulados se ha añadido para conectar un led verde (con resistencia en serie), que no está en el esquema principal, y que sirve para indicar visualmente que el sistema se halla en marcha.
Encima de la placa principal se conecta la placa STM8L Discóvery tal y como se muestra en la figura.
Placa STM8L Discovery conectada
Con ello ya tenemos la mayor parte del sistema. Para montar el conjunto se ha empleado una caja de madera ya que es un material muy fácil de mecanizar. La siguiente figura muestra el interior de la caja con todos los componentes. La placa Discovery se ha fijado con el infalible método de la goma elástica y dos tornillos. No es la solución más elegante, pero funciona.
Se observan los siguientes elementos:
Placa principal
Placa de pulsadores
Relés
Interruptor general S4
Alimentador de 12V
Entrada de alimentación de 220V
Salida para la luz del acuario a 220V
Salida para la boba de filtrado a 220V
Conector RCA para conectar el motor del alimentador de comida
Delante del conector USB de la placa Discovery se ha practicado un orificio en la caja para poder programar el sistema sin necesidad de desmontarlo. Eso si, para evitar conflictos, no conviene tener alimentado el sistema cuando se programa por USB.
La siguiente figura muestra la caja cerrada con sus conexiones externas: Entrada de 220V, enchufes de la luz y la bomba de filtrado y sistema de alimentación de comida.
Sistema con sus conexiones
La última figura muestra la parte frontal de la caja con todos sus elementos de interacción con el usuario.
Frontal del sistema
Los elementos son:
Interruptor general S4
Led que indica que el sistema está en marcha
Display LCD
Los 3 pulsadores, de arriba a abajo: (+) (OK) (-)
Cuando el sistema está en marcha, el display muestra la hora actual y tres indicaciones usando las barras que se hallan a la derecha del LCD. En concreto se indica si está operando en modo manual o automático y si se hallan en marcha la bomba y/o la luz.
En este preciso momento el sistema está en marcha controlando el acuario.
Una vez diseñada la electrónica toca implementarla para poder ponerla a prueba. Para ello he montado el circuito con lo que se conoce como "Spread Table Integration". Esto es, juntar todos los elementos esparcidos por la mesa y con un montón de cables. Para hacer el prototipo portátil lo he puesto dentro de una maleta de plástico tal y como se muestra en la siguiente figura:
Spread table integration
Como se observa, se han fabricado diferentes módulos que pueden emplearse en distintos proyectos y se han conectado entre sí siguiendo el esquema del artículo anterior. Despues de acabar de probar el prototipo, los módulos se guardan para un uso futuro en otro proyecto.
En la figura se aprecia:
1 - Placa STM8L Discovery
2 - Módulo con un regulador 7805
3 - Modulo con un driver H L923D
4 - Módulo de pulsadores y leds (sólo se usan 3 pulsadores)
5 - Relés
Una vez que tenemos la parte eléctrica resuelta, queda la programación.
Programando el prototipo
El documento UM0991 explica como descargar el entorno de desarrollo STVD y el compilador Cosmic Compiler.
Actualización
Actualmente tengo instaladas las versiones de evaluación, limitadas a 32k tanto del Compilador Cosmic como el de Raisonance. Ambos funcionan correctamente bajo STVD. No obstante, la versión del código indicada en esta proyecta únicamente compila sin errores bajo Raisonance.
Una vez tenemos ambas herramientas instaladas, podemos descargar el fichero:
Este fichero contiene tres proyectos, uno de ellos, denominado "Discover" contiene el código fuente del software que viene preprogramado en la placa. Ya contiene el enlace a todas las librerias necesarias para trabajar con todos los periféricos, incluido el LCD. Por tanto, para desarrollar un nuevo proyecto, basta con modificar el código contenido en main.c
El proyecto Aquarium es, desde el punto de vista del software, bastante sencillo. El software se desarrollará al estilo Arduino, lo más simple posible y sin emplear interrupciones.
Básicamente tendremos:
Una rutina de inicialización que inicia los puertos de I/O y otros periféricos como el oscilador de 32kHz y el reloj de tiempo real. También leerá la configuración previa guardada en memoria no volátil.
Un bucle de dentro de main ( ) que irá comprobando que no se pulse el botón OK ni tampoco se de la hora a la que se tenga que hacer alguna acción como encender o apagar la luz o la bomba o dar de comer a los peces.
Diferentes rutinas que son llamadas cuando se da algún evento de interacción con el usuario o con el acuario.
Dado que el sistema no emplea interrupciones, se deberá cuidar la programación para evitar que nos saltemos algún evento cuando se está procesando otro.
El fichero "main.c" es el único fichero modificado dentro del proyecto Discovery. El contenido del fichero main modificado es accesible desde este enlace:
Desde un punto de vista funcional el sistema, cuando está en marcha, muestra la hora actual en el LCD. Por defecto la bomba de filtrado está siempre en marcha. En cada instante se verifica si la luz debe estar encendida dependiendo de la hora de encendido y apagado de la luz.
Cuando llega la hora de dar comida a los peces, el sistema para la bomba y hace un número programable de ciclos de giro en el alimentador de comida. A continuación se programa el sistema para que la bomba se encienda un cierto tiempo mas tarde (15 minutos por defecto).
En cualquier momento, mientras se muestra la hora, se puede pulsar el botón (OK). Ello invoca el menú de configuración, el cual permite realizar las siguientes acciones:
Dar de comer a los peces sin esperar la hora programada
Cambiar entre los modos manual y automático de funcionamiento
Fijar la hora actual
Fijar la hora de encendido de la luz
Fijar la hora de apagado de la luz
Fijar la hora en que han de comer los peces
Fijar el número de giros que debe hacer el alimentador
Guardar la configuración en la memoria EEPROM del microcontrolador
El sistema arranca en modo automático y controla la luz, la bomba y la alimentación de los peces. Si se pasa a modo manual, la bomba y la luz quedan en marcha y se pueden controlar con los interruptores S5 y S6 (ver esquema). En modo manual, para alimentar los peces se puede emplear la primera opción del menú.
Cada vez que arranca el sistema, se mira si hay información de configuración en la memoria EEPROM del microcontrolador. Por tanto, cuando se apaga el sistema por completo, lo único que se pierde es la información de la hora actual.
Probando el prototipo
Una vez programado todo el sistema sólo queda ponerlo a prueba, para ello se pone sobre el acuario tal y como se muestra en la figura y se deja unos dias funcionando.
Prototipo en funcionamiento
Una vez verificado el funcionamiento del prototipo, lo último que queda es desarrollar la versión final del sistema.
Una vez fabricado el alimentador de comida del acuario, todo el resto del sistema es electrónica. Para empezar realizaremos las especificaciones generales del sistema. Para poder elegir el microcontrolador a emplear.
El sistema deberá poder controlar 3 elementos. El control del motor del alimentador debe ser bidireccional por lo que emplearemos un driver en H. Para controlarlo necesitaremos 2 líneas digitales.
El control de la bomba y la luz se realizará con relés y requerirá una línea de I/O cada uno.
El sistema debe sincronizar las diferentes acciones con la hora del dia por tanto, nos convendría disponer de un reloj de tiempo real. Para mostrar la hora actual y programar el sistema necesitamos un display. Con un display LCD de 6 dígitos tenemos bastante. Si puede ser alfanumérico, mejor.
Para programar el sistema se ha elegido emplear un control con 3 botones, un botón (+) un botón (-) y un botón (OK). Para ello necesitaremos 3 líneas de I/O que, sumadas a las 4 anteriores dan un total de 7.
En definitiva necesitamos:
7 Líneas de I/O
2 Para el control del alimentador de comida
2 Para los relés de control de la bomba de filtrado y la luz
3 Para los botones de control
Reloj de tiempo Real
Display LCD
La placa STM8L Discovery, de la familia de placas Discovery de bajo coste es perfecta para esta aplicación. Dispone de un LCD alfanumérico de 6 dígitos con algunos segmentos extra adicionales. Dispone también de un cristal de cuarzo de 32768 Hz y el hardware necesario para el reloj de tiempo real. Además el precio está muy bien (Menos de 11 Euros en Farnell).
La placa STM8L Discovery
La página web de ST contiene mucha información sobre esta placa, pero lo principal para trabajar con ella a nivel de hardware es el manual de usuario.
Consiguiendo las I/Os necesarias
El único problema de la placa STM8L Discovery es que, debido a la gran cantidad de líneas de I/O que emplea el LCD, quedan pocas lineas disponibles para uso externo. En concreto sólo hay 3 líneas de I/O completamente disponibles: PA2, PA3 y PC0. La placa emplea las líneas PE7 y PC7 para controlar dos leds de usuario. Podemos emplear estas dos líneas al mismo tiempo para controlar los relés de la luz y la bomba de filtrado. Adicionalmente la línea PC1 se emplea para el botón de usuario que lleva la placa. Dado que necesitamos 3 botones, asignaremos uno de ellos a la línea PC1 y los otros dos a las dos líneas disponibles PA2 y PA3. Con ello nos queda únicamente la línea PC0 disponible pero necesitamos dos lineas todavía para controlar el motor del alimentador.
Para obtener más líneas de I/O, podemos eliminar el sistema de medida de corriente de alimentación que incorpora la placa. Este sistema emplea las líneas de I/O PE6, PC4 y PF0. Si eliminamos los puentes de soldadura SB11, SB12 y SB14 y ponemos el jumper JP1 en posición OFF, tal y como se indica en el manual, tendremos esas 3 líneas de I/O disponibles para cualquier uso externo.
Con ello las líneas de I/O empleadas serán:
PA2 : Botón (+)
PC1 : Botón (OK)
PA3 : Botón (-)
PC0, PC4 : Control del motor del alimentador
PE7 : Relé de la luz
PC7 : Relé de la bomba
Todavia nos quedan libres las líneas PE6 y PF0 para ampliaciones futuras si hace falta.
H Drivers
Ni el motor del alimentador ni los relés pueden ser directamente accionados por un microcontrolador. Para actuar sobre ellos se requiere algún tipo de driver.
Dado que el motor ha de poder ser actuado bidireccionalmente, lo mejor es emplear un driver en H. Uno de los integrados más típicos de este tipo es el L293D que incorpora 2 drivers en H completos. Por simplicidad de soldadura, emplearemos la versión DIL de 16 pines.
Tal y como muestra su datasheet, el driver puede controlar 2 motores de manera bidireccional o 4 motores en un único sentido. En nuestro diseño emplearemos un driver H para el motor del alimentador y las otras dos mitades del driver restante para controlar los 2 relés de la luz y la bomba de filtrado.
Debido a que el driver L293D ya incorpora diodos de protección flyback, no es necesario añadirlos al esquema.
Esquema completo
Juntando todo lo anterior se llega al esquema que se muestra en la figura siguiente.
Esquema eléctrico
Las conexiones en color rojo y azul son las únicas peligrosas al estar a 220V. El resto de señales trabaja por debajo de los 5V.
En el esquema se han indicado los puertos del microcontrolador empleados y la posición en la que se halla el terminal empleado. Así, por ejemplo, el pulsador (+) S1 se halla conectado a PA2 que está disponible en el quinto terminal de la fila izquierda de conexiones de la placa. En todo caso no hay pérdida porque las señales se hallan perfectamente rotuladas sobre la placa.
También se indican los pines del encapsulado DIL16 del driver L293D. Los pines 1, 8, 9 y 16 se hallan conectados a alimentación. Los pines 1 y 9 corresponden a los Enables de los 2 drivers en H que dejaremos permanentemente activos. Los pines 8 y 16 corresponden, respectivamente, a las alimentaciones de los motores y la circuitería digital, que dejaremos a +5V.
Para abaratar costes, la alimentación eléctrica del sistema se ha
construido en torno a un viejo alimentador de 12V que tenía por ahí
tirado. Añadiéndole un regulador 7805
disponemos de la tensión requerida por la placa STM8L Discovery.
Cualquier alimentador entre 9V y 12V habría valido mientras de la
corriente suficiente para alimentar el motor y los relés.
El motor del alimentador de comida se ha conectado a los pines 3 y 6 del L293D que son la salida del primer driver H. Para girar en un sentido se ha de poner PC0 alto y PC4 bajo. Para girar en el sentido contrario se ha de poner PC0 bajo y PC4 alto, para parar el motor basta poner PC0 y PC4 en el mismo nivel lógico.
Como se observa, las conexiones de la luz y la bomba se toman de las salidas NC (Normally Closed) de los relés. Eso significa que ambos elementos se hallan activos cuando los relés están apagados. La conexión se ha realizado así para que cuando el sistema está apagado (con S4 abierto) tanto la luz como la bomba se puedan controlar manualmente con los interruptores S5 y S6. Lógicamente cuando es sistema funciona tanto S5 como S6 deben permanecer cerrados para que el sistema pueda controlar la luz y la bomba.
Los relés empleados son de tipo G5LA. La elección de estos relés se ha hecho porque son muy baratos, a menos de 1€ cada uno. En encendido de cada relé provoca el apagado del sistema que alimenta (luz o bomba de filtrado). Debido a que uno de los terminales de la bobina del relé se halla a +5V, los relés se encenderán con un nivel bajo de las salidas que lo controlan (PE7 o PC7). Por tanto, los leds de la placa LD3 y LD4 asociados, respectivamente, a PE7 y PC7, se encenderán al mismo tiempo que lo haga la luz o la bomba. A modo de ejemplo, para el control de la luz:
Nivel alto en PE7: Apagado de RL1 y encendido de la Luz y del LED LD3 (Verde)
Nivel bajo en PE7: Encendido de RL1 y apagado de la Luz y del LED LD3 (Verde)
Y para la bomba de filtrado:
Nivel alto en PC7: Apagado de RL2 y encendido de la Bomba y del LED LD4 (Azul)
Nivel bajo en PC7: Encendido de RL2 y apagado de la Bomba y del LED LD4 (Azul)
Con ello acaba la descripción del esquema eléctrico. En el proximo artículo hablaré del primer prototipo y del programa que controla el microcontrolador.
Este artículo fué reseñado en hackaday el 14 de abril de 2012.
Con este artículo empiezo la explicación del proyecto Aquarium. Se trata de un proyecto relativamente sencillo que permite automatizar los cuidados diarios de un acuario usando un microcontrolador de 8 bits.
Acuario a automatizar
El acuario al que hacer referencia el proyecto es el de la figura de arriba. Un pequeño acuario de agua dulce caliente de unos 20 litros. El acuario cuenta con un sistema de control de la temperatura del agua, una bomba de aire para oxigenar el agua, una luz fluorescente y una bomba para el filtrado del agua.
El sistema de control de temperatura está permanentemente en marcha para mantener a los peces en la zona de confort entre los 26 ºC. Igualmente la bomba de aire está también permanentemente en marcha para garantizar a los peces un suministro continuo de oxígeno.
El cuidado diario del acuario consisten en:
Apagar la luz por la noche y encenderla por el dia
Dar de comer a los peces una vez al dia
Apagar la bomba mientras los peces comen para evitar ensuciar el filtro con comida
Lo que se pretende en este proyecto es automatizar los tres puntos anteriores de manera que se pueda gestionar el acuario automáticamente durante unos dias de viaje o vacaciones. Eso no evita tener que limpiar el filtro o cambiar parte del agua de vez en cuando, pero automatiza el trabajo del dia a dia.
La siguiente figura muestra un esquema general del sistema a diseñar:
Esquema general
El sistema contará con un LCD y algunos botones para controlar sus funciones.
La bomba de aire y el control de temperatura se dejarán siempre en marcha, por lo que nuestro sistema únicamente tendrá que gestionar la luz, la bomba de filtrado y la alimentación de los peces.
Como tanto la bomba de filtrado como la luz son sistemas eléctricos, bastará un relé para controlar cada uno. El principal problema es la alimentación de los peces, dado que esta se hace actualmente de manera completamente manual, por lo que se ha de diseñar un sistema completo.
Dando de comida a los peces
Existen en el mercado sistemas para dar de comer a los peces de manera automática. En general se trata de sistemas que tienen un depósito más o menos grande de comida que se va dosificando poco a poco en tomas controladas por un temporizador horario.
Uno de los sistemas típicos, esquematizado en la figura siguiente, se basa en emplear un depósito grande "A" de comida unido a otro pequeño "B" en el que cabe sólo una dosis.
Dando un giro completo al depósito grande, se transfiere una pequeña cantidad de comida al depósito pequeño, la cual cae dentro del acuario al acabar una vuelta completa. Tal y como se muestra en la siguiente figura.
Funcionamiento de un alimentador típico
La rotación del depósito normalmente es contínua y lenta por lo que cada vez que el depósito pequeño "B" queda en la parte de abajo del depósito grande "A", cae una dosis de comida.
Para implementar esta solución se requeriría de:
Un depósito
Un motor
Un desmultiplicador
Un sistema de detección de origen
El motor hace girar el depósito, pero dado que los motores eléctricos normales giran demasiado rápidamente, es necesario desmultiplicarlos mediante engranajes para lograr la lenta velocidad de rotación que requiere el sistema. Adicionalmente, para saber cuantas vueltas se han dado y para dejar siempre el sistema en la misma posición de reposo, será necesario un sistema que permita indicar cuando el depósito pasa por una determinada posición.
Como deseamos un sistema lo mas sencillo posible, vamos a eliminar el desmultiplicador y el sistema de detección de origen. La propuesta es la mostrada en la siguiente figura:
Alimentador a implementar
Con la solución propuesta el depósito grande "A" ya no puede dar vueltas completas porque tienen un tope. En la posición de reposo "Stop 1" el depósito se halla contra el tope que limita el giro en la dirección horaria. A partir de ese punto se hace girar el depósito en dirección antihoraria hasta que llegue al tope en sentido contrario y se detenga en la posición "Stop 2". Después de que se alcance esta posición, se puede volver a mover el depósito, esta vez en sentido horario, para volver a la posición "Stop 1". Cada vez que el motor gira y pasa de una posición "Stop" a la otra, cae algo de comida en el acuario.
Con esta solución simplificada únicamente necesitamos:
Un depósito
Un motor
Lo cual es realmente sencillo.
Para implementar el depósito "A" se ha elegido un bote cilíndrico de los que antes se empleaban para película fotográfica de 35mm. Para el depósito dosificador "B" pequeño se ha elegido un recorte de un blister de comprimidos de ibuprofeno. La siguiente figura muestra el detalle del posicionamiento del depósito "B".
Detalle del depósito "B"
Al depósito le insertaremos un eje que lo atraviesa para poder girarlo. La siguiente figura muestra el depósito con el eje y el tope que evita que pueda dar vueltas completas.
Depósito alimentador
Para garantizar que la comida llega siempre al depósito pequeño, situaremos el eje inclinado con el orificio de salida en la parte mas baja.
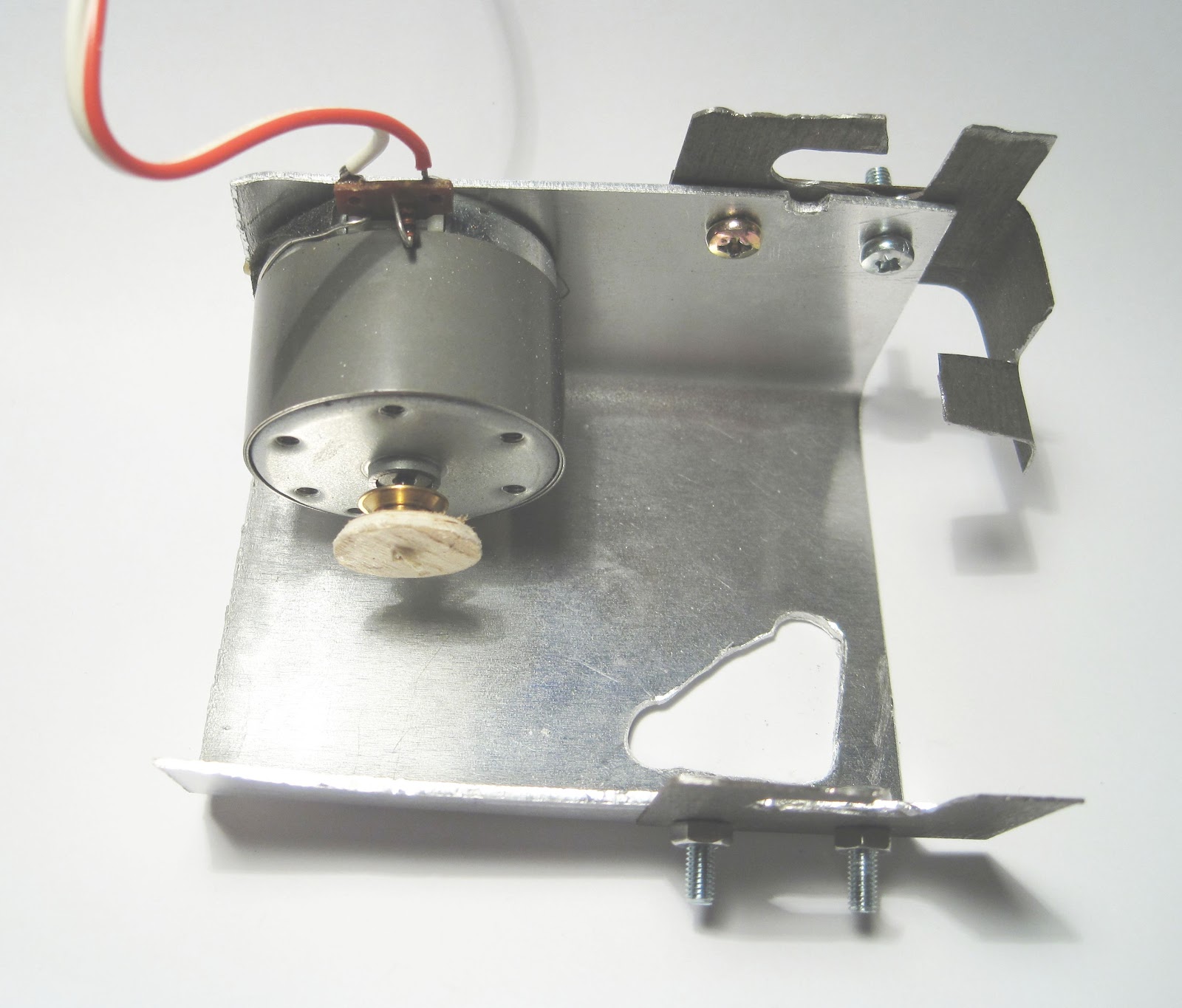
La siguiente figura muestra el soporte para el depósito de comida con el motor montado. El motor se ha recuperado de un radiocasette desmontado hace ya bastante tiempo.
El soporte se ha realizado sobre una plancha de aluminio. El motor (1) se ha pegado con cola de impacto. La pieza (2) es el tope que limita el giro del depósito. Las guías (3 ) y (4) encajan con el eje del depósito. Finalmente, el orificio triangular de la parte inferior (5) es por donde cae la comida.
Elementos del soporte del alimentador
En la siguiente figura se muestra un detalle del encaje del eje del depósito. El uso de una goma elástica para la transmisión del motor obliga al eje a apoyarse en el lado izquierdo del soporte.
Detalle del soporte del eje
La siguiente figura muestra el sistema alimentador completo. La transmisión entre el motor y el depósito se realiza mediante una goma elástica. Al motor se ha añadido un pequeño disco de madera que evita que la goma se salga del eje del motor.
Alimentador completo
Una vez diseñado el sistema alimentador, que es la única parte con una cierta complejidad mecánica, el resto es prácticamente todo electrónica.
En el siguiente artículo de sobre el acuario explicaré el esquema eléctrico empleado para el sistema.













































{kind=link}